
凭借与人类相似的形态和运动能力,人形机器人未来有望被广泛应用于各种操作和运动任务中,以支持或替代人类工作。
然而,在狭窄受限较多的工作环境中,要想让人形机器人在其中稳健工作,必须使其具备多接触运动能力。
多接触运动不仅涉及机器人四肢末端的接触(如手和脚),还涉及四肢中间部位(如膝盖和肘部)的接触。
尽管近年来人们对人形机器人多接触运动的规划和控制已经进行了积极研究,但目前实现多接触运动的人形机器人大多数仅限于手和脚,而不是像人类一样能与整个身体的任意区域进行接触。
▍提出新控制方法,实现全身多接触运动
一般来说,我们将涉及机器人任意身体部位接触的运动定义为全身多接触运动。
要想实现这种复杂的运动形式,主要面临两大挑战:全身接触感知的能力,和在多接触状态下的平衡控制。
近日,来自CNRS-AIST JRL和东京理科大学的研究人员携手合作,对此进行了深入研究,并开发了一种控制方法。

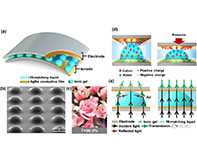
该方法通过安装在机器人身体表面的分布式触觉传感器,实现了全身多接触运动。与传统的力/扭矩传感器相比,这些薄而灵活的分布式触觉传感器能够在不对机器人身体形状进行大改的前提下,测量全身接触情况。这使得机器人不仅能实现四肢末端的多接触运动,还能通过四肢中间部位(如膝盖和肘部)进行支撑,从而大大提高了机器人在面对干扰和环境误差时的运动稳定性。
从传感器的开发到基于传感器的运动生成,关于人形机器人触觉测量的研究范围虽然广泛,但除了双足行走时机器人脚底的压力中心(CoP)和支撑区域的计算外,之前很少有研究使用触觉传感器进行人形机器人的平衡控制。在本研究中,该团队明确使用触觉传感器来控制全身接触的人体运动的平衡。
通过扩展以前开发的有效多接触运动控制技术,研究团队为机器人配备了分布式触觉传感器,将测量范围扩展至中间区域,并通过使用力/扭矩传感器和分布式触觉传感器的反馈控制来稳定机器人运动与平衡。动力学模拟验证结果表明,研究团队开发的触觉反馈大大提高了全身多接触运动对干扰和环境误差的稳定性。
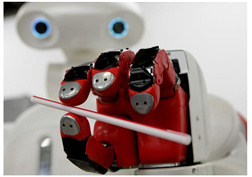
此外,研究团队还进行了模拟世界和真实世界的实验。在测试中,肢体上安装了分布式触觉传感器的真人大小人形机器人RHP Kaleido展示了各种全身多接触运动,如向前迈步并用前臂接触支撑身体以及以大腿接触保持坐姿平衡等。这表明,通过研究团队开发的控制方法,人形机器人可以执行全身多接触运动,并且具有更好的稳健性。
该研究成果的相关论文以“Whole-Body Multi-Contact Motion Control for Humanoid Robots based on Distributed Tactile Sensors”为题发表在《IEEE Robotics and Automation Letters》上。
接下来,一起来和机器人大讲堂深入探索这一研究成果!
▍两大实现难点?新控制方法如何实现?
据了解,研究团队提出的控制系统由质心运动控制和肢体运动控制两部分组成。相比之前开发的控制系统,新系统增加了基于触觉传感器的模块扩展,用于适应全身接触。具体来说:

质心运动控制
其质心运动控制通过作用在机器人质心(Center of Mass, CoM)上的合力矩(Resultant Wrench)来实现。合力矩由分布在机器人各接触区域的接触力矩组成,这些接触力矩基于分布式触觉传感器测量的实际接触多边形进行在线更新。质心运动规划采用模型预测控制(Model Predictive Control, MPC),以最小化质心状态与参考状态之间的误差,并通过比例-微分(Proportional-Derivative, PD)反馈控制进行质心状态稳定。

肢体运动控制
其肢体运动控制通过分布接触力矩到各接触区域来实现期望的合力矩。力矩分配通过求解一个二次规划问题来完成,确保满足单边和摩擦约束。此外,采用阻尼控制(Damping Control)来实现各接触区域的期望接触力矩,其中分布式触觉传感器用于测量实际接触力矩。
分布式触觉传感
为了实现全身多接触运动控制,研究团队还在机器人肢体表面安装了分布式触觉传感器,以获取关键接触信息。这些分布式触觉传感器由多个只能测量法向触觉响应的单元组成,数据从这些单元转换为接触力矩,用于阻尼控制。为了在线更新接触多边形顶点,系统基于分布式触觉传感器的测量估计接触表面区域,并计算包含所有检测到接触的单元的最小矩形作为接触多边形。

▍仿真与真实实验,证明控制方法可行!
为了验证控制方法的可行性,研究团队为真人大小人形机器人RHP Kaleido的前臂和双腿安装了了分布式触觉传感器电子皮肤,并进行了模拟世界和真实世界的实验。

仿真实验
在动力学模拟器MuJoCo中,研究团队通过虚拟人形机器人JVRC13验证了全身多接触运动的有效性。仿真实验涉及肘部接触行走、膝部接触站立和大腿接触坐姿三种运动。实验结果表明,与没有触觉反馈相比,采用触觉反馈显著提高了机器人运动的鲁棒性。

肘部接触行走:在有误差的倾斜墙面上行走时,采用触觉反馈的机器人能够在更大的墙面高度误差范围内稳定行走,并且改善了仅基于脚部零力矩点(Zero Moment Point, ZMP)的跟踪性能。

膝部接触站立:在受到前后方向干扰力时,采用触觉反馈的机器人能够承受更大的干扰力,保持平衡。

大腿接触坐姿:在可旋转座椅板上坐姿时,采用触觉反馈并更新接触区域的机器人能够成功保持平衡,避免向后翻倒。

真实世界实验
在真实世界中,研究团队使用装备有分布式触觉传感器e-skin的人形机器人RHP Kaleido进行了全身多接触运动演示。

初步实验通过人与机器人前臂的物理交互验证了触觉反馈的有效性。随后,机器人成功执行了前臂接触环境的行走运动和仅大腿接触座椅的坐姿平衡运动。
实验结果表明,机器人能够在全身多接触运动中保持稳定,尽管存在环境误差和模型误差。
参考文章
https://ieeexplore.ieee.org/document/10706003
- 关键词:触觉传感器 人形机器人
- 浏览量:10864
- 来 源:机器人大讲堂
- 编辑:清风
- 声明:凡本网注明" 来源:仪商网"的所有作品,版权均属于仪商网,未经本网授权不得转载、摘编使用。
经本网授权使用,并注明"来源:仪商网"。违反上述声明者,本网将追究其相关法律责任。
本网转载并注明自其它来源的作品,归原版权所有人所有。目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。如有作品的内容、版权以及其它问题的,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
本网转载自其它媒体或授权刊载,如有作品内容、版权以及其它问题的,请联系我们。相关合作、投稿、转载授权等事宜,请联系本网。
QQ:2268148259、3050252122。 -

-
 揭秘!分布式触觉传感器如何让人形机器人“感知”世界,实现全身多接触运动?前沿科技|2024-12-25
揭秘!分布式触觉传感器如何让人形机器人“感知”世界,实现全身多接触运动?前沿科技|2024-12-25 -
 低成本机器人“柔性皮肤”实现三维力的自解耦前沿科技|2024-12-18
低成本机器人“柔性皮肤”实现三维力的自解耦前沿科技|2024-12-18 -
 机器人硬件拆解:柔性传感器在智能机器人和脑机接口的应用产品应用|2024-12-18
机器人硬件拆解:柔性传感器在智能机器人和脑机接口的应用产品应用|2024-12-18 -
 中国科大在触觉传感器研究中取得重要进展前沿科技|2024-11-27
中国科大在触觉传感器研究中取得重要进展前沿科技|2024-11-27 -
 中国科学技术大学苏州高等研究院等研发全球最透明的触觉传感器前沿科技|2022-08-24
中国科学技术大学苏州高等研究院等研发全球最透明的触觉传感器前沿科技|2022-08-24 -
 澳门大学研发出新型自供电可穿戴仿生触觉传感器前沿科技|2021-06-25
澳门大学研发出新型自供电可穿戴仿生触觉传感器前沿科技|2021-06-25 -
 清华在多功能感知传感器及机器人应用取得突破性进展前沿科技|2020-12-21
清华在多功能感知传感器及机器人应用取得突破性进展前沿科技|2020-12-21 -
 国内机构与新加坡大学合作研制柔性电容式触觉传感器前沿科技|2019-06-21
国内机构与新加坡大学合作研制柔性电容式触觉传感器前沿科技|2019-06-21 -
 半导体工业机器人常用的传感器解析半导体|2019-03-07
半导体工业机器人常用的传感器解析半导体|2019-03-07 -
 盘点:机器人传感器分类技术分析|2015-08-28
盘点:机器人传感器分类技术分析|2015-08-28