
本文给出了基于三电平逆变拓扑输出功率达2MW的地铁制动能量回馈控制逻辑及控制策略,并给出了相应的实验结果。
1 双馈逆变器控制系统
1.1 地铁列车供电分析
轨道交通列车采用直流牵引供电,安全性与可靠性是城市轨道交通的根本,因此整流机组采用技术可靠的24脉波二极管整流方案实现。二极管的单向导电特性,使得列车在电制动时反馈到直流牵引网的能量无法回馈到电网,引起电压攀升,因此需要配置回馈装置抑制电压攀升,使列车安全运行。

如图1所示,列车在1500V至1800V的网压条件下运行时,其牵引系统的电制动能力可以正常发挥,当网压超过limit1(1800V)时,其电制动能力将随网压的升高而线性地下降,直至电压升高到limit2(1950V),电制动能力降为0,如果接触网网压继续升高到limit3(2050V)时,牵引系统控制单元将封锁IGBT驱动,进行第一级软保护,当网压继续越升至limit4(2100V)时,牵引系统将切断其供电主回路的高速断路器,进行第二级硬保护。
由此可知,需将直流网压抑制在1800V以内。根据宁波地铁实测数据,列车在无任何吸收的情况下,直流牵引网压将在300ms内攀升至2100V。
整流机组带有下垂特性,根据广州地铁九号线数据,负载为0.5%Ie,电压不超过1650V;100%Ie电压不超过1500V;300%Ie电压不低于1320V。
综上分析,考虑到列车吸收、接触网阻抗以及避免与整流机组构成环流,一般回馈启动电压点设置为1700左右。考虑到装置不会频繁启动整流功能,将整流启动电压点设定为1500V,在列车牵引时,将下垂的电压拉回至1500V。
1.2 系统模型分析
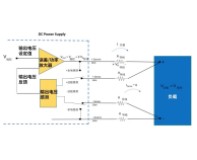
图2给出了本文设计的地铁制动能量回馈装置的功率回路原理图,系统由直流柜、变流器柜、变压器柜三部分组成。直流牵引网通过直流1500V开关、隔离开关以及电抗器送到变流器柜输入,经过三相半桥逆变单元将制动能量的直流电转换成交流电,再通过升压变压器升至33kV并入中压电网。

系统控制拓扑如图3所示(接触器、断路器不参与闭环控制,这里省略),前级挂接牵引网,额定电压1500V,在地铁运行期间直流母线电压随地铁启动和制动而波动。系统控制主要包括:并网电流控制(含孤岛扰动、直流分量控制)、电压控制、限功率控制、锁相控制、中点电位平衡控制以及SVPWM调制。

图3中网络标识符说明:Uref电压环给定值,Udc为母线电压反馈值,ΔV为正负母线电压差;Sign(v*i)为三相调制波分别和该相电流乘积正负符号;Va、Vb、Vc为三相调制波;Sa1~Sc4为驱动信号;Pset和Qset为有功功率和无功功率设置值;ADE指电能芯片负载输出有功和无功采样并传送给控制芯片,用于限功率控制;id_island\iq_island为孤岛扰动给定;id_dc\iq_dc为直流分量控制给定;idr和iqr为限功率控制后的电流环dq给定;idf和iqf为电感电流反馈dq值;wL为电流d值和q值之间的解耦系数(w为角速度);ud和uq为电压前馈dq值;uqr为锁相环给定值。
1.3 双向馈能控制逻辑
定义:Urec_start为大整流启动电压(1300V~1500V可设置);Urec_stop为大整流停止电压(1500V~1550V可设置);Uinv_stop代表大逆变停止电压(也叫馈能停止电压,1550~1650V可设置);Uinv_start表示大逆变启动电压(也叫馈能启动电压,1650~1950V可设置);Uref为电压环给定值(1500~1600V可设置)。
正常运行过程中,如
Urec_start=1450V;Urec_stop=1500V;Uref=1500V;Uinv_stop=1550V;Uinv_start=1650V,牵引网过压保护点2100V,欠压保护点1320V,能量流向与牵引网电压关系曲线如图4所示。
馈能启动后,电流达到额定电流时间设置300~500ms,根据现场工况设置,各启动、停止点电压的检测滤波时间均为10ms。

1.4 逆变馈能控制策略
1.4.1 改进数字锁相环
基于d-q变换的改进数字锁相环如图5所示,DSP先对三相电压采样值ua(k)、ub(k)和uc(k)进行3s/2s变换处理得到uα和uβ,按等功率Clarke变换可得三相电压在两相静止坐标系下正序分量[12]:


其中,正序分量可由电网通过数学变换、移相得到:实轴部分通过50Hz带通滤波器G0(s),滤除其他各次谐波;虚轴部分通过50Hz移相滤波器G90(s)进行90°滞后相位,同时滤除高频干扰。

按照采样频率1.5kHz,双线性z变换方法,对以上传递函数离散化处理可得:

由(1)关系得到式(3)数字滤波器,对uα和uβ分别移相、滤波和换算得到uα+和uβ+;对uα+和uβ+进行2s/2r变换处理得到uqr(k)和udr(k)。uqr(k)作为锁相环给定值其反馈值始终设置为0,通过PI控制器得到频率值加上内部基准频率(50Hz)即可做为实时跟踪频率;已知开关频率fs积分求得实时的相位角θ,而sin(θ)和cos(θ)既是内部闭环信号,也作为三相电压d-q反变换的基准信号。
1.4.2 中点电位平衡控制
空间电压矢量脉宽调制(SVPWM)算法在三电平逆变器中包含27种开关状态、19个电压矢量,按照传统方式实现三电平SVPWM调制需要使用大量条件判断,占用较多CPU资源且逻辑复杂。
SVPWM本质上可以看作是正弦波叠加零序分量,并采用中心对称规则采样的载波调制。且叠加零序分量的载波调制(CBPWM)并不需要如同SVPWM方法进行大量数学运算,因此采用叠加零序分量的载波调制。SVPWM等效的CB-PWM叠加的零序分量Vzero为:

Va,Vb,Vc为三相正弦调制波,max()为取最大值函数,min()为取最小值函数。

SVPWM调制三电平对母线电容充放电时,使中点电位偏移。采用SVPWM方法,通过分配流入中点电流相反的冗余小矢量的作用时间来控制中点电位平衡。CB-PWM同样可叠加零序分量来控制中点电位,根据载波及电流方向,判断出所需注入零序分量方向,控制框图如图6所示。

1.5 电压、电流环及限功率控制算法
图7给出了系统电压控制示意图,电压环使用PI控制器,令母线电压跟随电压给定值Uref,电压环输出作为电流环的给定值。电压闭环给定值分两种:缓启动给定值和正常运行给定值、稳压馈能和牵引网模式。稳压馈能和牵引网模式适用于调试阶段使用。

缓启动:母线电压从0V开始由辅助接触器吸合缓冲,再由主接触器吸合缓冲,最后启动反向整流跟踪牵引网电压。
正常运行:电压环给定 1500V~1600V可设置,正常情况下牵引网电压高于停止电压且低于启动电压(1650V~1950V可设)。本系统对电压环的PI输出会做相应限幅处理,满足现场应用需求:当牵引网电压在启动电压和停止电压之间时,通过限制电压环输出限幅值来禁止逆变馈能,允许反向整流。当列车制动引起电压抬升到启动电压及以上,通过放开电压环限幅来启动逆变馈能,并在电压重新下降到停止电压时禁止逆变馈能。
地铁现场要求牵引网电压大于启动电压后馈网功率从0到额定功率所需时间300ms~500ms,为保证馈网功率变化速率可控,对电压环PI输出进行限幅。PI限幅按固定步长递增或递减,步长根据设置的满载馈能响应时间Tr、系统开关频率fs以及额定电流Ir换算,电压环PI输出限幅变化步长为:

电压环PI系数选择必须满足现场需求,积分环作用快慢跟Ki系数、启动电压和停止电压均有关系。以最小的启动电压1650V,最高的电压环给定1600V为计算依据,只要保证电压环PI输出变化速率大于300ms满载馈能响应时间对应的限幅变化步长Istep(300ms)=(1111.0/(1500*0.3))=2.47即可。
图8给出了三相并网电流控制框图,由电压给定经过电压PI调节器的输出加上有功设置值Pset限幅后作为电流d值给定,同理电流q值给定由系统设置的无功Qset值决定;idf和iqf为电感电流反馈dq值,通过wL解耦系数进行解耦控制;电流环PI控制器输出后叠加电网电压前馈ud和uq,以提高系统对电网波动的抗扰性。

功率控制环实现输出期望的功率,便于测试不同功率段性能指标。功率控制环是根据地铁工况设置的功率对并网电流进行闭环限幅,使输出功率精度满足要求1%。有功、无功电流限幅式子如下:


式中,Pset、Qset为用户设置的有功功率和无功功率,Ppi_out、Qpi_out为电能芯片ADE7878实时计算的功率闭环调节输出,Ug为电网线电压有效值,限功率控制环路框图如下:

由上图可知,电流环限幅主要由Pset/Ug和 Qset/Ug决定,限功率环PI控制器起到微调作用。在电感电流采样准确、滤波电容无功补偿准确的情况下,限功率控制环PI控制器输出为0,电流限幅直接等于Pset/Ug和Qset/Ug。
实际因电感电流采样偏差、无功补偿不到位,就需要PI控制器对电流限幅进行微调,ADE7878作为电能计量芯片,具备较高的采样精度,因此可用于校正功率。
2 实验结果与分析
为验证所提出的控制方法,研制了一台峰值功率变换2MW、适用于2MW制动能量地铁机组的双馈变流设备,逆变并网试验波形如图10所示。

其中通道4为并网AB线电压900V,通道1~3分别为A、B、C三相电流,此时逆变馈网总功率为2MW。
地铁制动馈能实际工况过程如图11(a)所示,设置整流启动电压Urec_start=1450V、整流停止电压 Urec_stop=1500V、电压环电压给定值Uref=1500V、馈能启动电压Uinv_start=1650V,馈能停止电压 Uinv_stop=1550V。中通道1为牵引网电压,通道3为A相输出电流,地铁制动馈网能量为2WM。
图11地铁制动能量回馈动态过程 :

(a) 地铁制动及牵引网电压平衡动态过程

(b) 大逆变馈能启动过程

(c) 大逆变停止过程
图11(b)当牵引网电压逐渐抬升到1650V后输出电流在300ms内递增到1WM制动满载电流,变流器实现逆变馈能。
图11(c)当牵引网电压逐渐下降到1550V时,大逆变停止,输出电流幅值逐渐减小,因大逆变停止的限幅渐变速度较慢,电流减小速度明显小于递增速度。当牵引网电压继续跌落到大整流启动点1450V时,大整流启动。
因电压环退积分速度和输出限幅,装置需要一段时间才能转入整流状态。牵引网电压逐渐恢复到大整流停止点以上,大整流停止,整流电流逐渐递减至小整流电流值,维持牵引网电压平衡。
为验证限功率控制功能,分别测试不同Pset、Qset以及PF设置值对应功率分析仪WT1800测量的实际值,并计算偏差量。如下表1~表3。

表1 Pset设置值与实测值对比

表2 Qset设置值与实测值对比

综合以上实验数据可知通过限功率控制可使输出有功功率、无功功率以及PF控制在预期精度内,以满足设计需求。
3 结论
依据2MW地铁制动能量回馈实际工况,给出了一种地铁制动能量回馈控策略及控制时序方案,并在一台额定功率1MW(峰值功率2MW)的双馈变流装置得到验证,提出的方法可有效回馈轨道交通的制动能量。
- 关键词:能量回馈 双馈逆变器 地铁制动 馈能并网
- 浏览量:4995
- 编辑:夏立
- 声明:凡本网注明" 来源:仪商网"的所有作品,版权均属于仪商网,未经本网授权不得转载、摘编使用。
经本网授权使用,并注明"来源:仪商网"。违反上述声明者,本网将追究其相关法律责任。
本网转载并注明自其它来源的作品,归原版权所有人所有。目的在于传递更多信息,并不代表本网赞同其观点或证实其内容的真实性,不承担此类作品侵权行为的直接责任及连带责任。如有作品的内容、版权以及其它问题的,请在作品发表之日起一周内与本网联系,否则视为放弃相关权利。
本网转载自其它媒体或授权刊载,如有作品内容、版权以及其它问题的,请联系我们。相关合作、投稿、转载授权等事宜,请联系本网。
QQ:2268148259、3050252122。 -

-
 电驱逆变器测试 - 从电池到电驱再到电池汽车行业|2024-07-05
电驱逆变器测试 - 从电池到电驱再到电池汽车行业|2024-07-05 -
 直流充电桩产线测试面临的技术议题与建议汽车行业|2024-04-25
直流充电桩产线测试面临的技术议题与建议汽车行业|2024-04-25 -
 逆变器并网测试方式技术分析|2023-12-13
逆变器并网测试方式技术分析|2023-12-13 -
 为什么在直流电源中采用远程感测?技术分析|2023-11-29
为什么在直流电源中采用远程感测?技术分析|2023-11-29 -
 EA-PSB 10000 双向可编程直流电源如何改善依据 LV123 汽车标准执行的测试产品应用|2023-09-04
EA-PSB 10000 双向可编程直流电源如何改善依据 LV123 汽车标准执行的测试产品应用|2023-09-04 -
 EV 电池的电气性能测试产品应用|2023-07-04
EV 电池的电气性能测试产品应用|2023-07-04 -
 EA Elektro-Automatik 助力氢燃料飞机的未来发展产品应用|2023-04-28
EA Elektro-Automatik 助力氢燃料飞机的未来发展产品应用|2023-04-28 -
 再生能源与储能系统整合的测试挑战产品应用|2023-04-06
再生能源与储能系统整合的测试挑战产品应用|2023-04-06 -
 将函数发生器与电源或负载相结合实现更有效的测试技术分析|2023-02-27
将函数发生器与电源或负载相结合实现更有效的测试技术分析|2023-02-27 -
 可编程电子负载选型指南(下篇)产品应用|2023-02-07
可编程电子负载选型指南(下篇)产品应用|2023-02-07